|
9月15日,百度联手央视新闻全程直播“万物智能—百度世界2020”大会。在上午的大会主论坛首发环节, 在下午的百度世界大会apollo自动驾驶分论坛上,百度全面阐释了单车智能、监控冗余和平行驾驶等实现全无人驾驶的技术,同时发布了无人车第五代自动驾驶套件和apollo 6.0版本,将自动驾驶发展进度条再向前推进一步。
(百度世界大会apollo自动驾驶分论坛) 7年积累,成就apollo全无人驾驶技术“底色” 百度自动驾驶研发项目启动于2013年,从在车库里自己动手攒出第一辆自动驾驶汽车,到2019年和一汽红旗联手打造中国首批前装量产车,百度自动驾驶套件和车型经历了4代更迭,每代的自动驾驶能力和安全性提升10倍,但成本降低一半,具备了量产的技术基础。
此外,自动驾驶技术的提升,还需要通过大规模的测试,不断发现问题、解决问题、验证问题、提升能力。
(
专业的车队离不开专业的
(北京apollo park)
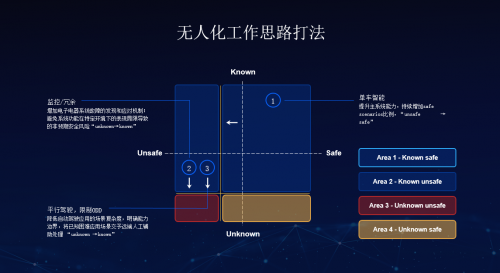
而自动驾驶的终极目标,则是“全无人驾驶”,解放驾驶员。如今,百度的全无人驾驶测试已 三大“无人化”产品 助力apollo练成自动驾驶终极目标 “全无人驾驶”听起来很酷炫,但实现起来并不容易。现场,百度apollo技术委员会主席王亮用一张四象限图给大家解释了无人化的技术路径,由外部结果视角的“安全”和“风险”以及系统内部视角的“已知”和“未知”构成,每个象限分别代表一种自动驾驶系统所处的状态。
(百度无人化思路打法) 从无人化目标出发,百度apollo用单车智能、监控冗余和平行驾驶3个技术动作,将横轴纵轴推到“安全”和“已知”最大化。 单车智能涵盖了定位、感知、决策规划和控制系统的整体能力;监控冗余是在软硬件系统的设计阶段加入充分的冗余对抗单点失效,可以理解为对安全的备份;通过主系统自动驾驶能力 安全冗余,可以将事故概率降低到百万分之一以下,超越普通人类司机的安全水平。 而平行驾驶则是对无人车的odd进行了限定,借助远端驾驶员帮助车辆完成脱困后再恢复到自动驾驶状态。利用5g平行驾驶,可以实现1个人远程帮助几十甚至上百辆自动驾驶车辆脱困,极大提升了效率。 |
百度世界2020apollo央视秀“肌肉” 全面迈入全无人驾驶阶段
发稿时间:2020-09-15 18:17:06
来源:财经界



责任编辑:夏晨风
猜你喜欢